Debottlenecking R&D performance with the Active Constraint framework
How nature debottlenecks
Microbes like Escherichia coli express hundreds to over a thousand proteins at a time. This seems like a lot until you consider that the microbe could be expressing as many as 4,500 proteins. Cells still need to choose which proteins to express.
Why don't they just express all the proteins, and keep handy the full repertoire of every protein function available all the time? The overaching reason is resource constraints. There's finite volume in a cell, so if the cell needs a lot more of one protein then it must reduce expression of another protein – literally to make space.
Proteins also need other macromolecules like the ribosome for translation, RNA polymerase and sigma factors for transcription, chaperones to fold proteins, and elaborate pathways to insert metals into folded proteins. If these machinery molecules are "tied up" making one protein, they're not available to make another protein.
So, there's a cap on total protein amount (volume or mass), and there's limited machinery available to manufacture proteins. For this reason, microbes like E. coli dynamically re-allocate their proteomes (set of all proteins) as the environment changes. In general, cells try to express the repertoire of proteins that optimize for survival, growth, or other performance function in a given environment.
If the environment shifts, it's probably advantageous to respond quickly. In some cases, hundreds of protein concentrations may need to change. The theoretically fastest way to reallocate the entire proteome is to identify the most rate-limiting group of proteins that are co-regulated, allocate all machinery to making that group, then repeat with the next rate-limiting group[1]. This optimal strategy applies in the absence of active protein degradation. So if protein degradation is available, that would improve upon this sequential debottlenecking solution.
So, what does this have to do with R&D performance?
Quite a bit actually.
Active Constraints
R&D pipelines will have a critical rate-limiting step, which if alleviated accelerates performance. At least until then next rate-limiting step is encountered.
We can apply a useful concept from mathematical optimization: the "active constraint". The active constraint includes the notion of the rate-limiting step; however, it adds more nuance.
Applying the properties of active constraints to R&D performance:
- Productivity cannot be enhanced without alleviating the active constraint
- Alleviating a constraint that is not active (inactive constraint) will do nothing to improve performance
- More than one constraint can be active at the same time (active constraint set)
Next, let's look at an illustrative example of active vs. inactive constraints for R&D performance.
Debottlenecking R&D performance
Consider the figure below:
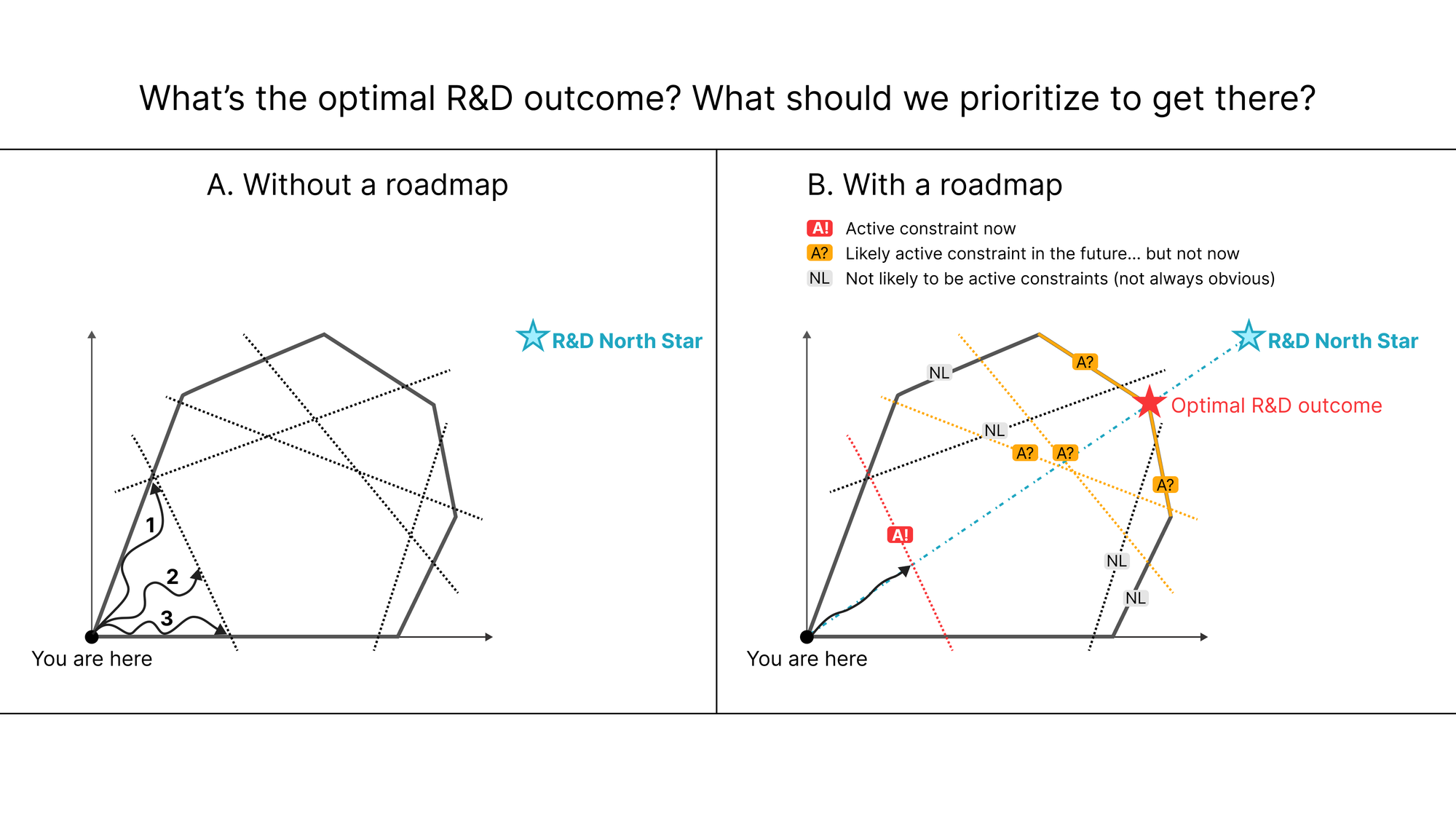
In the figure are depicted two R&D teams, or scenarios, A and B. For both teams:
- You have an R&D North Star: the ideal outcome you're moving toward. If you could wave a magic wand and get anywhere in a world with no constraints, that's where you want to go.
- Due to real-world constraints, the best expected R&D outcome is less ideal than the north star. The dark lines forming the outer boundaries of the hexagon are (hard) constraints that cannot be removed. The dashed lines are (transient) constraints that can be removed with investment.
- Your starting point is at the origin point (0,0), possibly far away from the north star, and the yet unknown real-world outcome.
Teams A & B are in the exact same situation, the same starting point, and share the same R&D north star. They differ because one has a roadmap and the other does not.
Team A may decide to take paths 1, 2, or 3 to reach the north star:
- Path 1: team decides to move upward, hits a constraint (the upper line), and then gets "stuck" at the intersection of two to three constraints: the upper dark line, and the two dashed lines. Now they need to debottleneck 2-3 things at once.
- Path 3: team moves downward, hits a constraint, bounces away, hits the same constraint, until getting "stuck" at the intersection of two constraints (the bottom hard constraint and the dashed line).
- Path 2: team takes a winding path until it hits a constraint.
Paths 1 & 3 are examples of getting stuck (path 1 is extra stuck) by trying to address constraints that aren't the most imperative. Path 2 is more efficient because it makes progress until hitting just one constraint. But it could be improved as it lacks direction and certainty.
Team B has a roadmap in place, which reveals an optimal path:
- Identifies the shortest path from present to North Star, and moves toward it efficiently
- Identifies the first critical active constraint ("A!"), and recognizes that alleviating it will create the largest forward momentum
- Identifies several other constraints that are likely to become active later ("A?"), assuming the shortest path is taken
- Identifies several constraints that are not likely to become active ("NL"), assuming they move along the optimal path
- Estimates what the optimal R&D outcome, subject to real-world constraints, will look like. Both in relation to the current state, and the ideal north star.
Team B gains efficiency in several ways:
- By estimating what the optimal R&D outcome (best case scenario) looks like, they are not seeking just the idealized outcome (north star) but a realistic outcome. This allows them to critically evaluate their return on R&D investment.
- They identify an optimal path. This enables them to avoid spending time, cost, and resources into solving problems that don't get them closer to the optimal outcome (the "NL" constraints).
- They know which challenges must be solved with top priority in order to move their R&D progress forward (the "A!" constraints).
- They can anticipate and derisk future constraints that likely require investment to resolve (the "A?" constraints).
Now, from Pavlov et al., we learned that the optimal strategy to reallocate limited resources to improve overall performance was a sequential debottlenecking approach: focus all resources to alleviating the most critical bottleneck first, then move on to the next one.
In the example above, this means roadmapping the optimal path, identifying the active (A!) constraint, then prioritizing resources to alleviate that active constraint to advance.
Takeaways
In R&D, there's a dozen different things that all look like they are important. But many of them are inactive constraints, and spending resources to address those will not improve our performance.
Instead, we must identify the active constraint--the most critical bottleneck for performance. Then, we must prioritize resources toward alleviating that active constraint to truly advance performance.
Afterwards, we will encounter another, different, active constraint. And we must be skilled at identifying the new active constraint amidst dozens of other constraints that are inactive. (Incidentally, the previous active constraint may now be an inactive constraint. What worked before may not work in our new situation, if we've moved far enough along that we're facing brand new challenges.)
Finally, in order to know what's an active constraint or not, we must also know which path we should be taking toward our R&D north star. And toward the ideal, real-world, R&D outcome.
Questions for you:
- Do you know what your R&D north star is?
- Can you estimate what the optimal R&D outcome is, subject to real-world constraints?
- Do you know what the active constraint are for your R&D team?
- Pavlov and Ehrenberg (2013) Proc Natl Acad Sci USA, 110:20527-20532